ລາຍລະອຽດ
ຮູບແບບຜະລິດຕະພັນ

ແບບ: DH12S-LD
ອຸປະກອນທີ່ໃຊ້ໄດ້:ເຄື່ອງ saw wire crawler
ແຜນວາດອຸປະກອນເສີມ
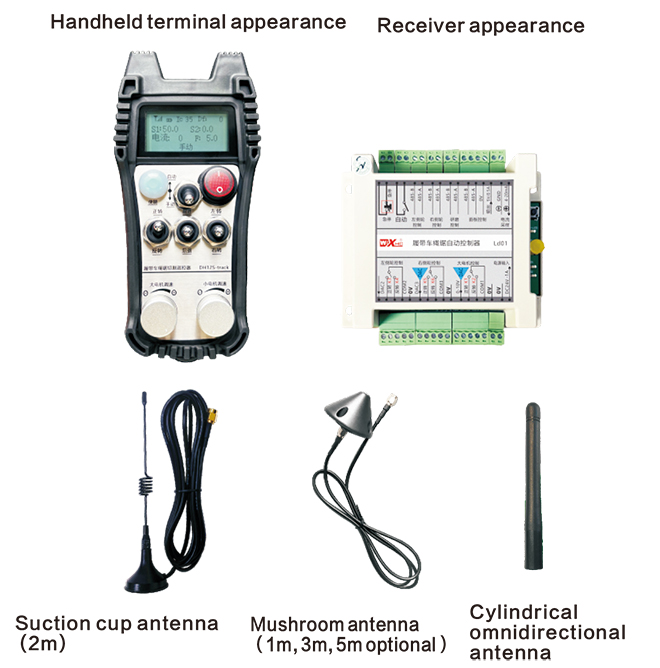
ຫມາຍເຫດ: ທ່ານສາມາດເລືອກເອົາຫນຶ່ງໃນສາມເສົາອາກາດ. ເສົາອາກາດການດູດນ້ໍາແມ່ນມາດຕະຖານໂດຍຄ່າເລີ່ມຕົ້ນ.
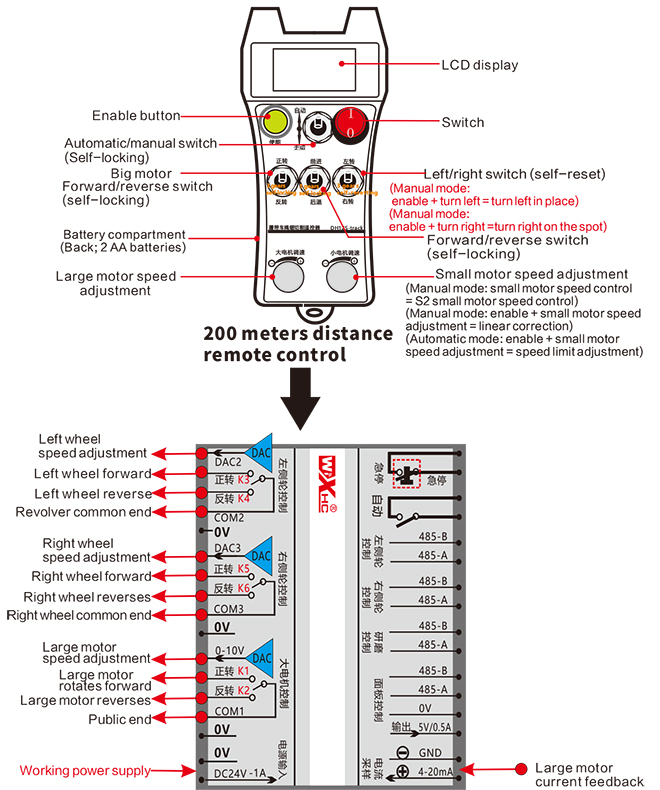
ລາຍລະອຽດການຄວບຄຸມໄລຍະໄກ
ການແນະນໍາທີ່ສະແດງ
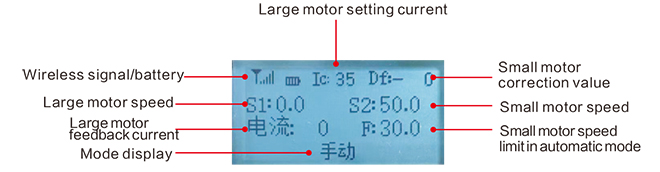
ຄວາມໄວມໍເຕີຂະຫນາດໃຫຍ່:S1:0-50
ຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ: S2: 0-50
ຄວາມໄວສູງສຸດຂອງເຄື່ອງຈັກຕັດອັດຕະໂນມັດ:F:0-30(ຕົວກໍານົດການສາມາດປັບໄດ້)
ຕັດອັດຕະໂນມັດສູງສຸດໃນປະຈຸບັນ: ໄອຄ: 0-35 (ພາລາມິເຕີສາມາດປັບໄດ້)
ຄ່າການແກ້ໄຂເສັ້ນຊື່: ແກງ: -99-99 (1 ຫນ່ວຍບໍລິການແມ່ນປະມານ 0.02V)

ແຮງດັນຕ່ໍາ: ແບດເຕີລີ່ຄວບຄຸມໄລຍະໄກແມ່ນຕໍ່າເກີນໄປ, ກະລຸນາທົດແທນແບັດເຕີຣີ.

ເຄືອຂ່າຍຫຼຸດລົງ: ສັນຍານໄຮ້ສາຍແມ່ນຂັດຂວາງ. ກະລຸນາກວດສອບພະລັງງານຂອງຜູ້ຮັບ, ພະລັງງານມັນອີກເທື່ອຫນຶ່ງ, ແລະເລີ່ມຕົ້ນການຄວບຄຸມໄລຍະໄກ.
ການຄວບຄຸມການຄວບຄຸມໄລຍະໄກປະຕິບັດງານ
1.ເປີດການຄວບຄຸມໄລຍະໄກ
ເມື່ອເປີດເຄື່ອງ, ແສງ RF-LED ຢູ່ໃນຕົວຮັບເລີ່ມກະພິບ;ຕິດຕັ້ງແບັດ AA ສອງອັນໃນ threceiver e ການຄວບຄຸມໄລຍະໄກ, ເປີດໃຊ້ໄຟຟ້າ, ແລະຈໍສະແດງຜົນຈະສະແດງຄວາມໄວຂອງມໍເຕີ, ສະແດງການເລີ່ມຕົ້ນທີ່ສໍາເລັດຜົນ.
2.ມໍເຕີຂະຫນາດໃຫຍ່ແລະລະບຽບຄວາມໄວ
ສົ່ງ “ຕໍ່ຫນ້າ / ດ້ານ” ປ່ຽນໄປຂ້າງຫນ້າ, ມໍເຕີຂະຫນາດໃຫຍ່ຂອງຜູ້ຮັບຈະເປີດ, ແລະຈໍສະແດງຜົນຈະສະແດງໄປຂ້າງຫນ້າ
ສົ່ງ “ຕໍ່ຫນ້າ / ດ້ານ” ປ່ຽນໄປປີ້ນກັບກັນ, ມໍເຕີຂະຫນາດໃຫຍ່ຂອງເຄື່ອງຮັບຈະເປີດຢູ່ໃນປີ້ນກັບກັນ, ແລະຈໍສະແດງຜົນຈະສະແດງການປີ້ນກັບກັນ
ຫມຸນໄດ້ “ການປັບຄວາມໄວມໍເຕີຂະຫນາດໃຫຍ່” ປຸ່ມເພື່ອປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ຂອງຕົວຮັບການປັບແຮງດັນຜົນຜະລິດ 0-10V;
3.ມໍເຕີຂະຫນາດນ້ອຍແລະລະບຽບຄວາມໄວ
ຍ້າຍ “ຕໍ່ຫນ້າ / ດ້ານ” ປ່ຽນໄປຂ້າງຫນ້າ, ລໍ້ຊ້າຍໄປຂ້າງຫນ້າແລະລໍ້ຂວາໄປຂ້າງຫນ້າຂອງເຄື່ອງຮັບແມ່ນເປີດ, ແລະຈໍສະແດງຜົນສະແດງໃຫ້ເຫັນຂ້າງຫນ້າ
ສົ່ງ “ຕໍ່ຫນ້າ / ດ້ານ” ປ່ຽນໄປປີ້ນກັບກັນ, ປີ້ນກັບລໍ້ຊ້າຍແລະລໍ້ຂວາຂອງຕົວຮັບແມ່ນເປີດ, ແລະຈໍສະແດງຜົນສະແດງໃຫ້ເຫັນປີ້ນກັບກັນ
4.ລ້ຽວຊ້າຍແລະຂວາ
ສົ່ງ “ຊ້າຍ/ຂວາ” ສະຫຼັບໄປຊ້າຍ, ລໍ້ຂວາຂອງຜູ້ຮັບຈະສົ່ງຕໍ່ ແລະເປີດ,ແລະຈໍສະແດງຜົນຈະສະແດງຊ້າຍ
ສົ່ງ “ລ້ຽວຊ້າຍ/ຂວາ” ສະຫຼັບກັບລ້ຽວຂວາ, ລໍ້ຊ້າຍຂອງຕົວຮັບຈະສົ່ງຕໍ່ແລະເປີດ, ແລະຈໍສະແດງຜົນຈະສະແດງໄປທາງຂວາ
5.ຫັນໃນສະຖານທີ່
ໃນຮູບແບບຄູ່ມື:
ລ້ຽວຊ້າຍຢູ່ໃນສະຖານທີ່: ກົດແລະຖື “ເປີດໃຊ້” ປຸ່ມ, ສົ່ງ “ລ້ຽວຊ້າຍ/ຂວາ” ສະຫຼັບໄປຊ້າຍ, ລໍ້ຊ້າຍຖອຍຫຼັງ ແລະລໍ້ຂວາໄປທາງໜ້າຂອງຕົວຮັບແມ່ນເປີດຢູ່,ແລະເລີ່ມຫັນຊ້າຍຢູ່ໃນສະຖານທີ່;
ລ້ຽວຂວາຢູ່ໃນສະຖານທີ່: ກົດແລະຖື “ເປີດໃຊ້” ປຸ່ມ, ສົ່ງ “ລ້ຽວຊ້າຍ/ຂວາ” ສະຫຼັບໄປຂວາ, ລໍ້ຊ້າຍໄປຂ້າງຫນ້າແລະລໍ້ຂວາປີ້ນກັບຂອງເຄື່ອງຮັບແມ່ນເປີດ, ແລະຜູ້ຮັບເລີ່ມຫັນຂວາຢູ່ໃນສະຖານທີ່;
6.ການປັບຂີດຈຳກັດຄວາມໄວຂອງມໍເຕີຂະໜາດນ້ອຍ
ໃນຮູບແບບອັດຕະໂນມັດ: ກົດຄ້າງໄວ້ “ເປີດໃຊ້” ປຸ່ມແລະຫມຸນ “ການປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ” ເພື່ອປັບຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດນ້ອຍໃນລະຫວ່າງການຕັດອັດຕະໂນມັດ;
7.ການຕັດອັດຕະໂນມັດ
ຂັ້ນຕອນທໍາອິດແມ່ນເພື່ອເລີ່ມຕົ້ນການ motor ໃຫຍ່; ຂັ້ນຕອນທີສອງແມ່ນການສະຫຼັບສະຫຼັບຮູບແບບເປັນ “ອັດຕະໂນມັດ”; ຂັ້ນຕອນທີສາມແມ່ນເພື່ອເລີ່ມຕົ້ນການ motor ຂະຫນາດນ້ອຍແລະຫນ້າຈໍຈະສະແດງ “ຕັດອັດຕະໂນມັດ”,ຊີ້ໃຫ້ເຫັນວ່າມັນໄດ້ເຂົ້າໄປໃນຮູບແບບການຕັດອັດຕະໂນມັດ;
8. ການແກ້ໄຂເສັ້ນຊື່
ໃນເວລາທີ່ມໍເຕີຍ່າງຊ້າຍແລະຂວາແມ່ນເຄື່ອນໄປຂ້າງຫນ້າແລະຖອຍຫລັງ, ຄວາມໄວຊ້າຍ ແລະຂວາບໍ່ສອດຄ່ອງກັນ, ແລະການຍ່າງເສັ້ນຊື່ deviates. ທ່ານສາມາດນໍາໃຊ້ຟັງຊັນການແກ້ໄຂເສັ້ນຊື່ຂອງການຄວບຄຸມໄລຍະໄກເພື່ອປັບຄວາມໄວຂອງລໍ້ຊ້າຍແລະຂວາ;
ຫຼັກການແກ້ໄຂ: ໂດຍຜ່ານຫນ້າທີ່ແກ້ໄຂ, ຄວາມໄວຂອງລໍ້ຊ້າຍແມ່ນປັບລະອຽດເພື່ອໃຫ້ບັນລຸຄວາມໄວດຽວກັນກັບລໍ້ຂວາ, ເພື່ອ synchronize ຄວາມໄວຂອງລໍ້ຊ້າຍແລະຂວາແລະລົບລ້າງ deviation ໄດ້;
ວິທີການປະຕິບັດການແກ້ໄຂ deviation: ໃນຮູບແບບຄູ່ມື, ກົດຄ້າງໄວ້ “ເປີດໃຊ້” ປຸ່ມແລະຫມຸນ “ກົດລະບຽບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ”;
ໝຸນຕາມເຂັມໂມງເພື່ອເພີ່ມແຮງດັນຄວາມໄວລໍ້ຊ້າຍ ແລະຄ່າການແກ້ໄຂໃນໜ້າຈໍສະແດງຜົນຈະເພີ່ມຂຶ້ນ;
ໝຸນເຂັມໂມງເພື່ອຫຼຸດແຮງດັນຄວາມໄວລໍ້ຊ້າຍ ແລະຄ່າການແກ້ໄຂການສະແດງຜົນໃຫ້ຫຼຸດລົງ;
ໄລຍະການແກ້ໄຂ: ຄ່າການແກ້ໄຂ -90 ເພື່ອ 90; ແຮງດັນການແກ້ໄຂຂອງຫນຶ່ງຫນ່ວຍການແກ້ໄຂແມ່ນປະມານ 0.02V;
9. ເມນູພາລາມິເຕີ (ຜູ້ໃຊ້ຖືກຫ້າມບໍ່ໃຫ້ປັບປຸງມັນໂດຍບໍ່ໄດ້ຮັບອະນຸຍາດ)
ບາງຫນ້າທີ່ຂອງການຄວບຄຸມໄລຍະໄກສາມາດປັບຕົວຜ່ານຕົວກໍານົດການ. ໃນຮູບແບບຄູ່ມື, ໃນເວລາທີ່ຄວາມໄວ motor ຂະຫນາດນ້ອຍ S2 ແມ່ນ 10, ຍູ້ດ້ານຂ້າງຫນ້າ / ປີ້ນກັບກັນສາມຄັ້ງຕິດຕໍ່ກັນ, ແລະຫຼັງຈາກນັ້ນຍູ້ມັນລົງສາມເທື່ອຕິດຕໍ່ກັນເພື່ອເຂົ້າໄປໃນເມນູພາລາມິເຕີ;
ອອກຈາກເມນູພາລາມິເຕີ: ເລືອກທີ່ຈະບັນທຶກຫຼືບໍ່ປະຢັດ, ຈາກນັ້ນກົດປຸ່ມເປີດໃຊ້ງານເພື່ອຢືນຢັນການອອກ;
ກະແສສູງສຸດ: ປະຈຸບັນການຈັດອັນດັບການເຮັດວຽກຂອງມໍເຕີຕັດແມ່ນ 80% ຂອງປັດຈຸບັນນີ້;
ຕົວກໍານົດການຄວບຄຸມຄວາມໄວ: ຕົວກໍານົດການຄວບຄຸມການຕັດອັດຕະໂນມັດ, ໃນຕອນຕົ້ນ 800, ການດັດແປງແມ່ນຖືກຫ້າມ;
ພາລາມິເຕີ Decelation: ຕົວກໍານົດການຄວບຄຸມການຕັດອັດຕະໂນມັດ. ໃນເວລາທີ່ການຕັດມູນຄ່າການປ່ຽນແປງໃນປະຈຸບັນເກີນມູນຄ່ານີ້,ການຊ້າລົງເລີ່ມຕົ້ນ.
ການເລັ່ງ A1: ຕົວກໍານົດການຄວບຄຸມການຕັດອັດຕະໂນມັດ, ໃນເວລາທີ່ປັດຈຸບັນຕັດແມ່ນຕ່ໍາກ່ວາກໍານົດການຕັດປັດຈຸບັນ, ຄວາມໄວຂອງການເລັ່ງ;
deceleration A2: ຕົວກໍານົດການຄວບຄຸມການຕັດອັດຕະໂນມັດ, ເມື່ອກະແສຕັດແມ່ນສູງກວ່າທີ່ກໍານົດໄວ້
ຕັດກະແສໄຟຟ້າ, ຄວາມໄວຂອງການຫຼຸດຜ່ອນໄດ້;
ຖອດມີດອັດຕະໂນມັດ: ບໍ່ຖືກຕ້ອງ;
ເລີ່ມຕົ້ນລັອກຕົວເອງ: 0, ບໍ່ມີການລັອກຕົນເອງ; 1, ລັອກດ້ວຍຕົນເອງ. ກົດປຸ່ມເປີດໃຊ້ງານ + ໄປໜ້າ ແລະ ປີ້ນກັບຜົນ ແລະ ລັອກຕົນເອງ.
ການຍ່າງສູງສຸດ: ຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດນ້ອຍ.
ການຕັດກະແສ: ກໍານົດປັດຈຸບັນສູງສຸດຂອງມໍເຕີຕົ້ນຕໍສໍາລັບການຕັດອັດຕະໂນມັດ. ຖ້າຄໍາຄິດເຫັນໃນປະຈຸບັນເກີນຄ່ານີ້, ມັນຈະເລີ່ມຊ້າລົງ.
ຂີດຈໍາກັດຄວາມໄວໃນຕອນຕົ້ນ: ຄວາມໄວສູງສຸດໃນຕອນຕົ້ນຂອງຄວາມໄວການຕັດອັດຕະໂນມັດໃນເວລາທີ່ເປີດເຄື່ອງ.
ແບບອັດຕະໂນມັດ: 0, ສະຫຼັບອັດຕະໂນມັດແມ່ນຄວບຄຸມອັດຕະໂນມັດ; 1, ສະຫຼັບອັດຕະໂນມັດຄວບຄຸມຈຸດອອກ IO ອັດຕະໂນມັດ.
ຂອບເຂດຈໍາກັດຄວາມໄວ: ຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດນ້ອຍໃນລະຫວ່າງການຕັດອັດຕະໂນມັດ.
ເຈົ້າພາບສູງສຸດ: ຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດໃຫຍ່.
ຄຸນລັກສະນະດ້ານໄຟຟ້າຄວບຄຸມຫ່າງໄກສອກຫຼີກ

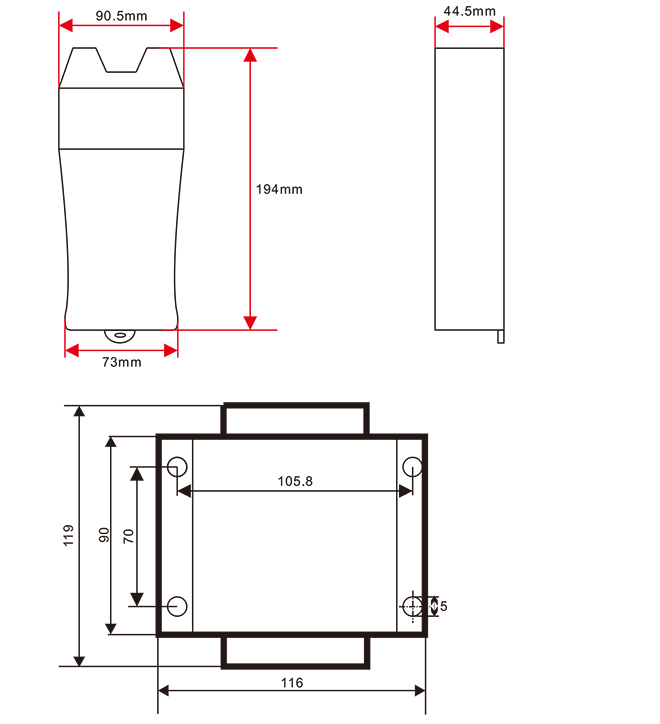
ຂະຫນາດຄວບຄຸມໄລຍະໄກ
ການຕີລາຄາສຸດທ້າຍສິດທິຂອງຜະລິດຕະພັນນີ້ເປັນຂອງບໍລິສັດຂອງພວກເຮົາເທົ່ານັ້ນ.








