應用:專門用於軌道鋸機器
1.支持自動切割模式, 根據大電機電流自動調整小電動機的步行速度, 並實現自動切割控制.
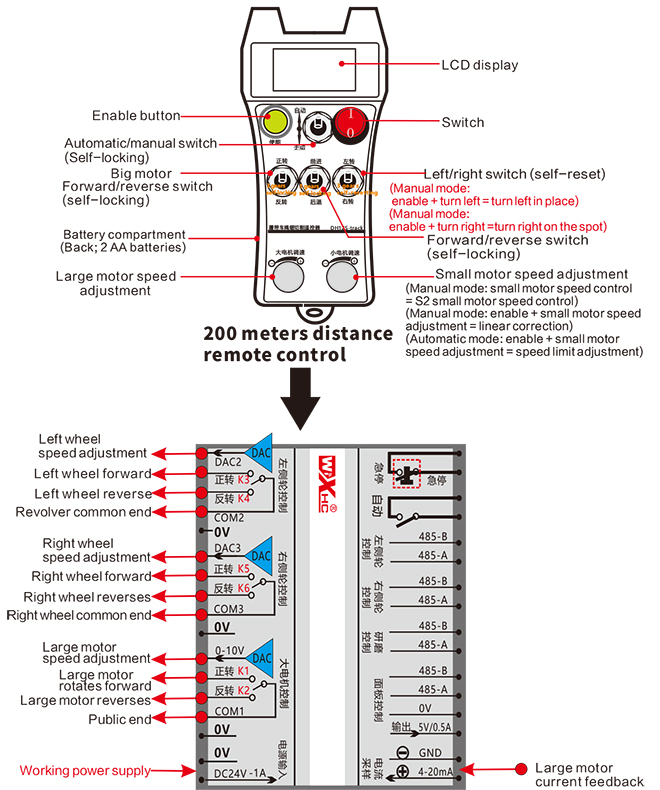
2.無屏障傳輸距離為 200 儀表.
3. 支持大型電動機和小型電動機的雙速度調節.
4. 支撐小型電動機旋轉到位.
5. 支撐左右車輪小電動機線性校正.
應用:專門用於軌道鋸機器
1.支持自動切割模式, 根據大電機電流自動調整小電動機的步行速度, 並實現自動切割控制.
2.無屏障傳輸距離為 200 儀表.
3. 支持大型電動機和小型電動機的雙速度調節.
4. 支撐小型電動機旋轉到位.
5. 支撐左右車輪小電動機線性校正.

模型: DH12S-LD
適用設備:履帶式繩鋸機
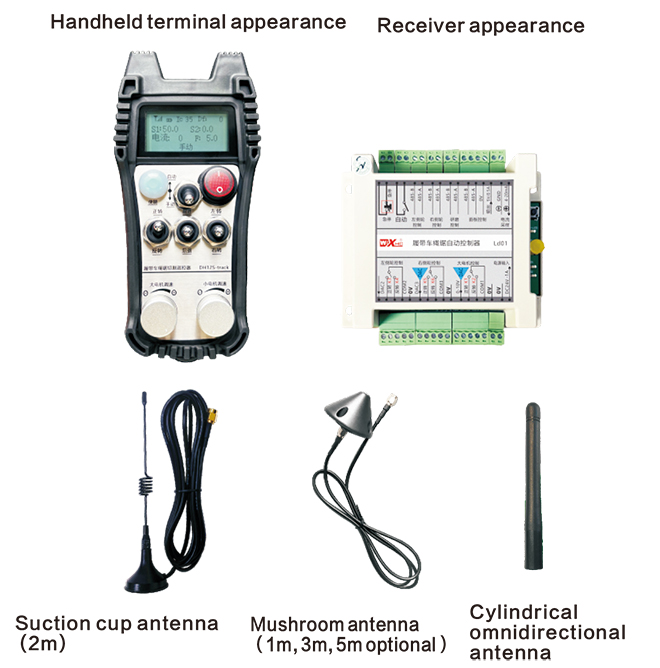
筆記: 您可以選擇三種天線之一. 默認標配吸盤天線.
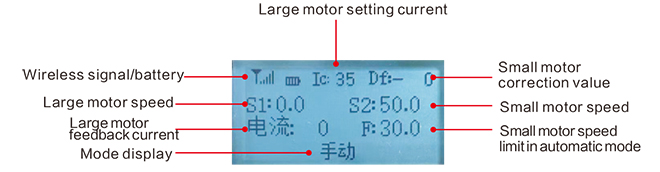
電機轉速大:S1:0-50
小電機轉速: S2: 0-50
自動切割小電機最高轉速:F:0-30(參數可調)
自動切割最大電流: 我知道了: 0-35 (參數可調)
線性修正值: df: -99-99 (1 單位約為0.02V)

低電壓: 遙控器電池電量過低, 請更換電池.

網絡掉線: 無線信號中斷. 請檢查接收器功率, 再次打開電源, 並重新啟動遙控器.
1.打開遙控器
當電源開啟時, 接收器上的 RF-LED 燈開始閃爍;在三個接收器和遙控器中安裝兩節 AA 電池, 打開電源開關, 顯示屏將顯示電機速度, 表示啟動成功.
2.大電機、調速
轉動 “前進/後退” 切換到轉發, 接收器的大電機將啟動, 並且顯示屏將向前顯示![]()
轉動 “前進/後退” 切換到反向, 接收器大電機將反轉, 並且顯示屏將顯示反向![]()
旋轉 “大電機調速” 旋鈕調節接收器大電機轉速調節輸出電壓0-10V;
3.小電機及調速
移動 “前進/後退” 切換到轉發, 接收器左前輪、右前輪開啟, 並且顯示屏顯示向前 ![]()
轉動 “前進/後退” 切換到反向, 接收器左輪倒車、右輪倒車開啟, 並且顯示屏顯示反向![]()
4.左轉和右轉
轉動 “左/右” 切換到左側, 接收器的右輪將向前並打開,顯示屏將顯示向左![]()
轉動 “左轉/右轉” 切換到右轉, 接收器左輪將向前並打開, 顯示屏將顯示右轉![]()
5.轉身到位
手動模式下:
原地左轉: 按住 “使能夠” 按鈕, 轉動 “左/右轉” 切換到左側, 接收器左輪向後、右輪向前打開,並開始原地左轉;
原地右轉: 按住 “使能夠” 按鈕, 轉動 “左/右轉” 切換到右側, 接收器左輪前進、右輪後退開啟, 接收器開始原地右轉;
6.小電機限速調節
自動模式下: 按住 “使能夠” 按鈕並旋轉 “小電機調速” 調節自動切割時小電機的最高轉速;
7.自動切割
第一步啟動大電機; 第二步,將模式開關切換至 “汽車”; 第三步啟動小電機,屏幕顯示 “切割自動”,表示已進入自動切割模式;
8. 直線校正
左右行走電機前進後退時, 左右速度不一致, 並且直線行走有偏差. 可以使用遙控器的線性校正功能微調左右輪的速度;
糾偏原理: 通過校正功能, 左輪的速度被微調以達到與右輪相同的速度, 從而使左右輪速度同步,消除偏差;
糾偏操作方法: 手動模式下, 按住 “使能夠” 按鈕並旋轉 “小電機調速”;
順時針旋轉左輪轉速電壓增大,顯示屏修正值增大;
逆時針旋轉左輪轉速電壓減小,顯示修正值減小;
修正範圍: 修正值 -90 到 90; 1個校正單元的校正電壓約為0.02V;
9. 參數菜單 (未經許可,禁止用戶修改)
遙控器部分功能可通過參數調節. 手動模式下, 當小電機轉速S2為 10, 連續向上推前進/後退開關3次, 然後連續按下三下進入參數菜單;
退出參數菜單: 選擇保存或不保存, 然後按啟用按鈕確認退出;
最大電流: 切割電機的額定工作電流為 80% 此電流的;
速度控制參數: 自動切割控制參數, 預設 800, 禁止修改;
加減速參數: 自動切割控制參數. 當切削電流變化值超過此值時,減速開始.
加速度a1: 自動切割控制參數, 當切割電流低於設定切割電流時, 加速度;
減速度a2: 自動切割控制參數, 當切割電流高於設定值時
切割電流, 減速度;
自動退刀: 無效的;
開始自鎖: 0, 無自鎖; 1, 自鎖. 按啟用鍵 + 正反轉生效並自鎖.
最大步行距離: 小電機最高轉速.
切割電流: 設置自動切割主電機最大電流. 如果反饋電流超過該值, 它會開始減速.
默認速度限制: 開機時自動切割速度默認最高速度.
自動模式: 0, 自動開關自動控制; 1, 自動開關控制自動IO輸出點.
限速偏移: 自動切割時小電機最高轉速.
最大主機數: 大型電機最高轉速.

本產品最終解釋權歸我司所有.