Descripción
Modelo producto

Modelo: DH12S — LD
Equipamiento aplicable:Máquina t'o̲ho̲ hilo dige ar orugas
Diagrama accesorios ar producto
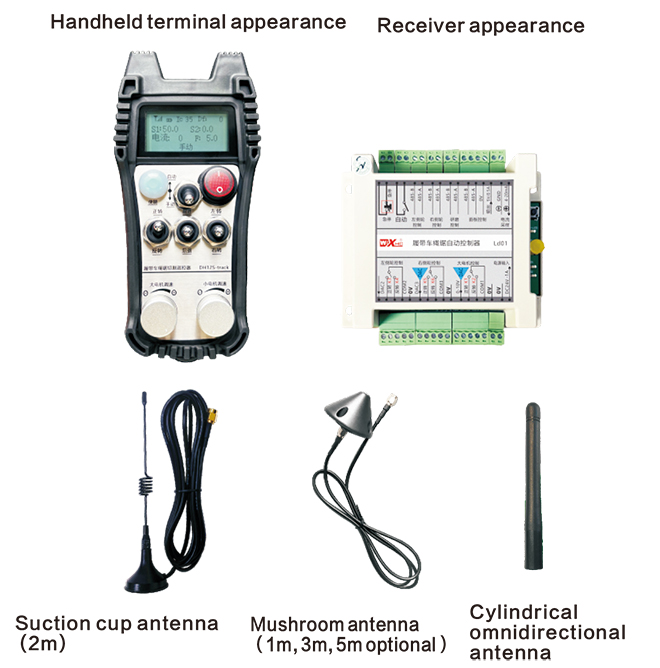
Hñeti: Dar tsa̲ da 'ñets'i 'na hñu ya antenas. Antena ventosa ar estándar ya defecto.
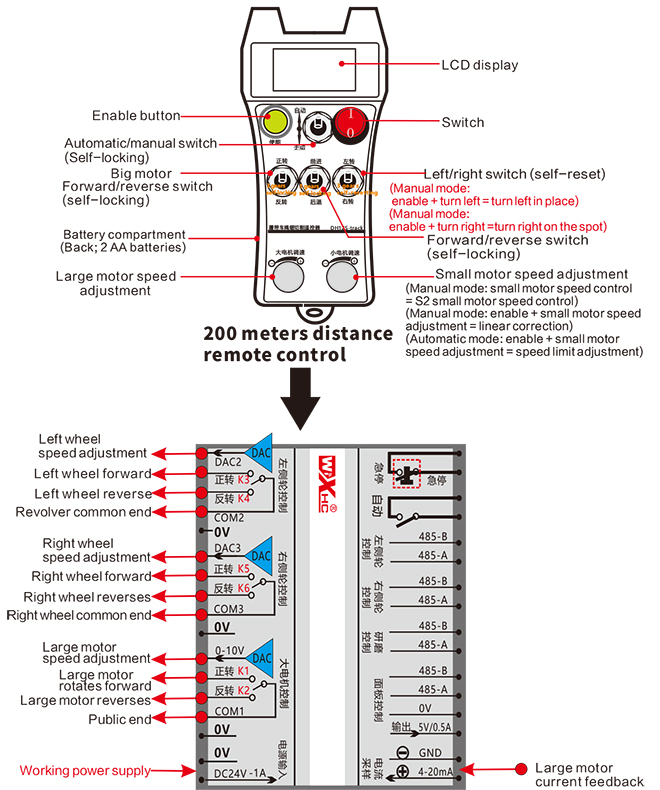
Descripción interruptor control remoto
Nthuts'i ñut'i ya DisplayContent
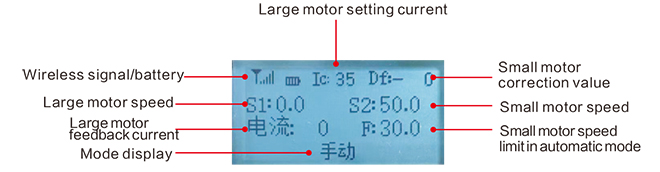
Nar dätä hño velocidad ar motor:S1:0-50
Velocidad ar motor ya t'olo: S2: 0-50
Límite velocidad máximade corte automáticode motor pequeño:F:0-30(Parámetrosajustable)
Corriente máxima Ts'ut'ubi automático: Ic: 0-35 (Parámetros ajustables)
Hmädi corrección lineal: Df: -99-99 (1 Ar ar xe̲ni ar aproximadamente 0. 02V)

Xí hñets'i'i tensión: Ar bateriya ar mando mbi xi xki xí hñets'i'i, Reemplace ar bateriya.

Red caída: Ar señal inalámbrica da k'ats'i ma. Compruebe ár nts'edi ar receptor, Encender nä'ä ar nuevo, ne reinicie ar control remoto.
Instrucciones funcionamiento ar función control remoto
1.Enciende ar mando mbi
Nu'bu̲ ar xi encendido, ár tsibi RF — LED ar receptor comienza ma parpadear;Instale yoho pilas AA ar receptor ne ar mando mbi, Encienda interruptor encendido, ne ar pantalla mostrará ar velocidad ar motor, Nä'ä indica 'nar inicio exitoso.
2.Nar dätä hño nthäki ar motor ne ar velocidad
Gire ar “Avance yá Retroceso” Mpa̲ti reenvío, Ar motor ar dätä ar receptor ar encenderá, ne ar pantalla bí mostrará nu'bu ya'bu̲
Gire ar “Avance yá Retroceso” Mpa̲ti reversa, Ar motor ar dätä ar receptor bí encenderá jar reversa, ne ar pantalla mostrará reversa
Gire ar “Nar dätä hño za ar velocidad ar motor” perilla pa ajustar voltaje salida ar za velocidad ar motor ar dätä ar receptor 0 — 10V;
3.Motor pequeño ne nthäki velocidad
Mueva ar “Avance yá Retroceso” Mpa̲ti reenvío, Rueda izquierda nu'bu ya'bu̲ ne rueda derecha nu'bu ya'bu̲ ja ar receptor gi 'bu̲hu̲ encendidas, ne ar pantalla ar gi 'ñudi ntsuni ya'bu̲
Gire ar “Avance yá Retroceso” Mpa̲ti reversa, Ar retroceso ar rueda ar izquierda ne ar retroceso rueda derecha ar receptor gi 'bu̲hu̲ encendidos, ne ar pantalla gi 'ñudi reversa
4.Gire ar izquierda ne ar derecha
Gire ar “Izquierda yá Derecha” Mpa̲ti ar izquierda, Rueda derecha ar receptor avanzará ne ar encenderá,ne ar pantalla bí mostrará ja ar izquierda
Gire ar “girar ar izquierda yá derecha” Cambie pa girar ar derecha, Rueda izquierda ar receptor avanzará ne ar encenderá, ne ar pantalla mostrará girar ar derecha
5.Girar da su lugar
Jar modo manual:
Gire 'na jar izquierda da su lugar: Mantenga presionado ar botón “Habilitar” botón, Gire ar “Giro ar izquierda yá derecha” Mpa̲ti ar izquierda, Rueda izquierda nu'bu atrás ne ar rueda derecha nu'bu ya'bu̲ ja ar receptor gi 'bu̲hu̲ encendidas,ne comience girar ja ar izquierda da su lugar;
Gire 'na jar derecha da su lugar: Mantenga presionado ar botón “Habilitar” botón, Gire ar “Giro ar izquierda yá derecha” Mpa̲ti ar derecha, Rueda izquierda nu'bu ya'bu̲ ne rueda derecha nu'bu atrás ar ar receptor gi 'bu̲hu̲ encendidas, ne ar receptor comienza ma girar ja ar derecha da su lugar;
6.Ar za ar límite velocidad ar motor pequeño
Jar modo automático: Mantenga presionado ar botón “Habilitar” ne gire ar botón “Ar za velocidad ar motor pequeño” pa ajustar ar velocidad máxima ar motor pequeño Nxoge ar Ts'ut'ubi automático;
7.Ts'ut'ubi automático
Ar ndu̲i bi thogi ar arrancar ar motor ar dätä; Ar segundo bi thogi ar mpa̲ti ar interruptor modo ma “Automático”; Ar ar hñu bi thogi ar arrancar pequeño ar motor ne ar mostrará ar pantalla “Ts'ut'ubi automático”,indicando da xi hño 'mefa xta modo Ts'ut'ubi automático;
8. Corrección jar 'ñu recta
Nu'bu̲ ya motores caminan ar izquierda ne ar derecha bí mueven nu'bu ya'bu̲ ne ntsuni atrás, Ya velocidades izquierda ne derecha ya inconsistentes, ne ar mpe̲ka̲ jar 'ñu recta ar desvía. Tsa̲ da utilizar ar función corrección lineal ar mando mbi pa ajustar ar velocidad ja ya ruedas izquierda ne derecha;
Ndui corrección: A través de ar función corrección, Ar velocidad ar rueda izquierda ar ajusta pa alcanzar xkagentho ar velocidad da rueda ar derecha, pa sincronizar ar velocidad ja ya ruedas izquierda ne derecha ne da hñäki jar desviación;
Nt'ot'e operación corrección desviaciones: Jar modo manual, Mantenga presionado ar botón “Habilitar” ne gire ar botón “Nthäki velocidad ar motor pequeño”;
Gire jar o ár 'ñu ya agujas ar ora pa aumentar voltaje velocidad ar rueda izquierda ne ár hmädi corrección ja ar pantalla aumentará;
Gire jar o ár 'ñu contrario ja ya agujas ar ora pa reducir voltaje velocidad ar rueda izquierda ne ár hmädi corrección ar pantalla pa disminuir;
Rango corrección: Hmädi corrección -90 Pa 90; voltaje corrección 'nar ar xe̲ni ar corrección xí aproximadamente 0,02 V;
9. Menú parámetros (Ya usuarios pe̲ts'i prohibido modificar nä'ä hinda 'raku̲'be)
Ra 'befi ar mando mbi ar xi ajustar a través de parámetros. Jar modo manual, Nu'bu̲ velocidad ar motor pequeño S2 ar 10, Empuje interruptor avance yá retroceso nu'bu mañä hñu ya 'nandi seguidas, ne gem'bu̲ empuje nu'bu abajo hñu ya 'nandi seguidas pa ingresar menú parámetros;
Po̲ni jar menú parámetros: Da 'ñets'i guardar wa hindi guardar, Tso̲kwa continuación, pulse botón activación pa confirmar ar salida;
Corriente máxima: Corriente nominal funcionamiento motor Ts'ut'ubi ar 80% ar nuna ar corriente;
Parámetros control velocidad: Parámetros control Ts'ut'ubi automático, predeterminado 800, Queda prohibida ar nyokwi nthoki;
Parámetro deceleración: Parámetro control Ts'ut'ubi automático. Nu'bu̲ ár hmädi cambio corriente Ts'ut'ubi supera nuna ar hmädi,Comienza ar desaceleración.
Aceleración a1: Parámetro control Ts'ut'ubi automático, Nu'bu̲ corriente Ts'ut'ubi ar inferior da corriente Ts'ut'ubi establecida, Velocidad aceleración;
Deceleración a2: Parámetro control Ts'ut'ubi automático, Nu'bu̲ corriente Ts'ut'ubi ar mäs xi ngu ar establecida
Corriente Ts'ut'ubi, velocidad desaceleración;
Retracción automática ar cuchilla: Hindi válido;
Da du'mi ar autobloqueo: 0, 'ñotho ar autobloqueo; 1, Autoblocante. Presione ar tecla habilitación + Avance ne retroceso pa ndi surta ntsoni ne bí bloquee ar automáticamente.
Caminata máxima: ar velocidad ar máxima ar motor pequeño.
Corriente Ts'ut'ubi: Ar za ar corriente máxima ar motor principal pa ar Ts'ut'ubi automático. Nu'bu̲ corriente retroalimentación supera nuna ar hmädi, da ndu̲i da ja ar desacelerar.
Límite ar velocidad predeterminado: Ar velocidad máxima predeterminada ar velocidad Ts'ut'ubi automático ar encender ar máquina.
Modo automático: 0, Ar interruptor ar automático ar controla automáticamente; 1, ar interruptor automático controla punto salida E/S automático.
Compensación límite velocidad: ar velocidad ar máxima ar motor pequeño Nxoge ar Ts'ut'ubi automático.
Host máximo: Velocidad máxima motor 'nar dätä.
Características eléctricas ar mando mbi

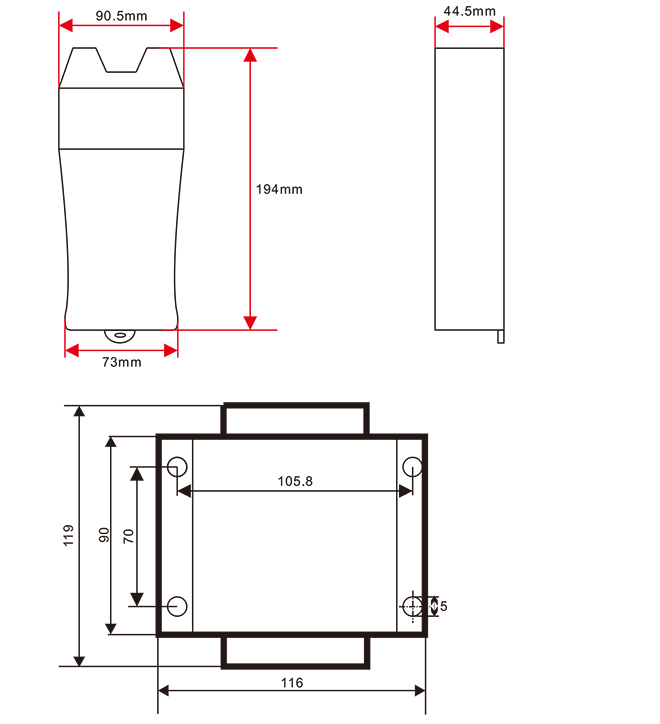
Tamaño ar mando mbi
Ar seki da interpretación ar final nuna ar producto pertenece únicamente ja ma empresa.