Descripció
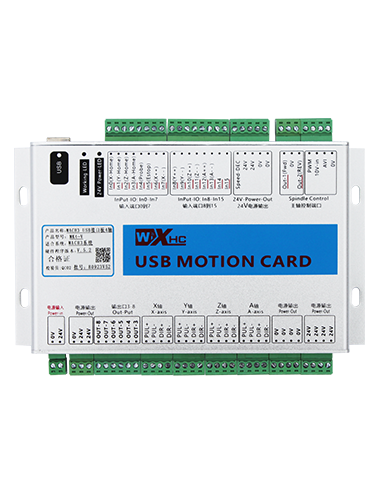
Model de producte

Model: DH12S-LD
Equipament aplicable:màquina de serra de filferro d'oruga
Diagrama d’accessoris de producte
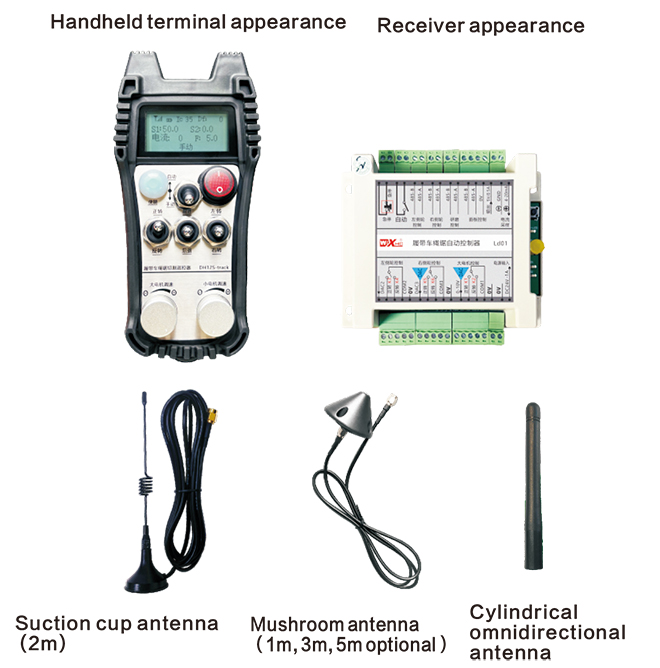
Nota: Podeu triar una de les tres antenes. L'antena de la tassa de succió és estàndard per defecte.
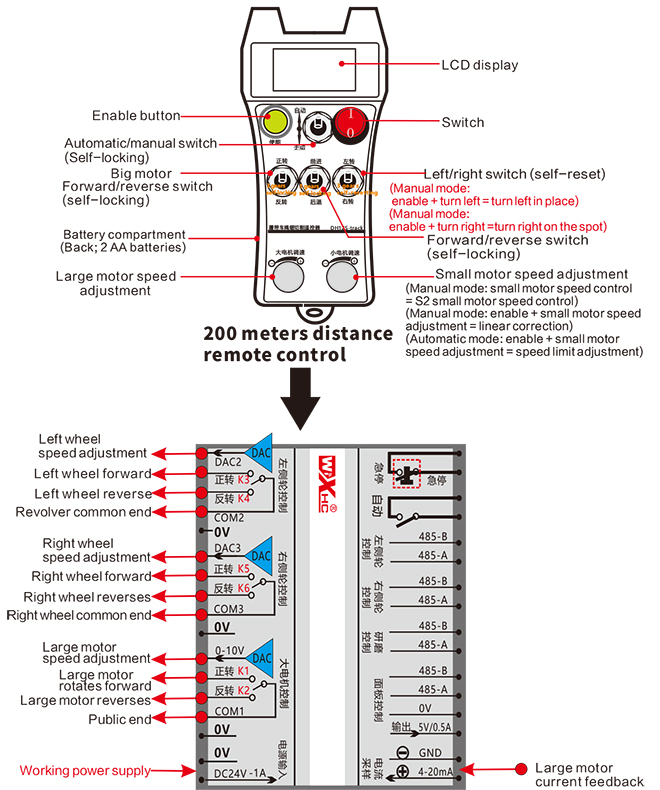
Descripció del commutador de control remot
Presentació del contingut de la pantalla
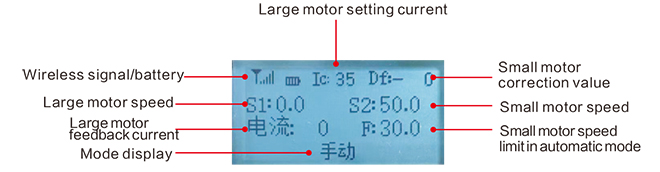
Gran velocitat del motor:S1:0-50
Velocitat del motor petita: S2: 0-50
Límit de velocitat màxima del motor petit de tall automàtic:F:0-30(paràmetres ajustables)
Corrent màxima de tall automàtic: Ic: 0-35 (paràmetres ajustables)
Valor de correcció lineal: Df: -99-99 (1 la unitat és d'uns 0,02 V)

Baixa tensió: La bateria de control remot és massa baixa, Substituïu la bateria.

La xarxa va caure: El senyal sense fils s’interromp. Comproveu la potència del receptor, Potencia’l de nou, i reinicieu el control remot.
Instruccions de funcionament de la funció de control remot
1.Enceneu el comandament a distància
Quan està encès, la llum RF-LED del receptor comença a parpellejar;instal·leu dues piles AA al comandament a distància del tres receptor, Engegueu l’interruptor d’alimentació, i la pantalla mostrarà la velocitat del motor, indicant una startup amb èxit.
2.Gran motor i regulació de velocitat
Gireu el “endavant/marrere” canviar a endavant, el gran motor del receptor s'encendrà, i la pantalla mostrarà endavant
Gireu el “endavant/marrere” canviar al revés, el gran motor del receptor s'encendrà al revés, i la pantalla mostrarà el revés
Gira el “gran ajust de velocitat del motor” botó per ajustar la tensió de sortida d'ajust de la velocitat del motor gran del receptor 0-10V;
3.Petit motor i regulació de velocitat
Mou el “endavant/marrere” canviar a endavant, la roda esquerra cap endavant i la roda dreta cap endavant del receptor estan activades, i la pantalla mostra endavant
Gireu el “Endavant/marrere” canviar al revés, la marxa enrere de la roda esquerra i la marxa enrere de la roda dreta del receptor estan activades, i la pantalla mostra el revés
4.Gireu a l'esquerra i a la dreta
Gireu el “Esquerra/Dreta” canviar a l'esquerra, la roda dreta del receptor avançarà i s'encendrà,i la pantalla mostrarà l'esquerra
Gireu el “girar a l'esquerra/dreta” canviar per girar a la dreta, la roda esquerra del receptor avançarà i s'encendrà, i la pantalla mostrarà girar a la dreta
5.Gireu al seu lloc
En mode manual:
Gireu a l'esquerra al seu lloc: Manteniu premut el botó “Activa” botó, gira el “Gir a l'esquerra/dreta” canviar a l'esquerra, la roda esquerra cap enrere i la roda dreta cap endavant del receptor estan activades,i comenceu a girar a l'esquerra al seu lloc;
Gireu a la dreta al seu lloc: Manteniu premut el botó “Activa” botó, gira el “Gir a l'esquerra/dreta” canviar a la dreta, la roda esquerra cap endavant i la roda dreta enrere del receptor estan activades, i el receptor comença a girar a la dreta al seu lloc;
6.Ajust del límit de velocitat del motor petit
En mode automàtic: premeu i manteniu premut “Activa” botó i gireu “Ajust de velocitat del motor petit” per ajustar la velocitat màxima del petit motor durant el tall automàtic;
7.Tall automàtic
El primer pas és posar en marxa el gran motor; el segon pas és canviar el commutador de mode “Automàtic”; el tercer pas és engegar el motor petit i es mostrarà la pantalla “Tall automàtic”,indicant que ha entrat al mode de tall automàtic;
8. Correcció de línia recta
Quan els motors de marxa esquerre i dret es mouen cap endavant i cap enrere, les velocitats esquerra i dreta són inconsistents, i la marxa en línia recta es desvia. Podeu utilitzar la funció de correcció lineal del comandament a distància per ajustar la velocitat de les rodes esquerra i dreta.;
Principi de correcció: Mitjançant la funció de correcció, la velocitat de la roda esquerra s'ajusta per aconseguir la mateixa velocitat que la roda dreta, per sincronitzar la velocitat de les rodes esquerra i dreta i eliminar la desviació;
Mètode d'operació de correcció de desviacions: En mode manual, premeu i manteniu premut “Activa” botó i gireu “Regulació de velocitat del motor petit”;
Gireu en el sentit de les agulles del rellotge per augmentar la tensió de velocitat de la roda esquerra i augmentarà el valor de correcció a la pantalla;
Gireu en sentit contrari a les agulles del rellotge per reduir la tensió de velocitat de la roda esquerra i el valor de correcció de la pantalla per disminuir;
Interval de correcció: Valor de correcció -90 a 90; la tensió de correcció d'una unitat de correcció és d'uns 0,02 V;
9. Menú de paràmetres (els usuaris tenen prohibit modificar-lo sense permís)
Algunes funcions del control remot es poden ajustar mitjançant paràmetres. En mode manual, quan la velocitat del motor petita S2 és 10, premeu l'interruptor endavant/marrere cap amunt tres vegades seguides, i després premeu-lo cap avall tres vegades seguides per entrar al menú de paràmetres;
Surt del menú del paràmetre: Trieu desar o no desar, a continuació, premeu el botó d'activació per confirmar la sortida;
Corrent màxim: el corrent nominal de funcionament del motor de tall és 80% d'aquest corrent;
Paràmetres de control de velocitat: paràmetres de control de tall automàtic, no pagar 800, està prohibida la modificació;
Paràmetre de desacceleració: paràmetre de control de tall automàtic. Quan el valor del canvi de corrent de tall supera aquest valor,comença la desacceleració.
Acceleració A1: paràmetre de control de tall automàtic, quan el corrent de tall és inferior al corrent de tall establert, la velocitat d'acceleració;
Desacceleració A2: paràmetre de control de tall automàtic, quan el corrent de tall és superior al establert
corrent de tall, la velocitat de desacceleració;
Retracció automàtica del ganivet: invàlid;
Comença a autoblocar: 0, sense autobloqueig; 1, autoblocant. Premeu la tecla d'activació + endavant i enrere per fer efecte i autobloquejar.
Caminada màxima: la velocitat màxima del motor petit.
Corrent de tall: establir el corrent màxim del motor principal per al tall automàtic. Si el corrent de retroalimentació supera aquest valor, començarà a desaccelerar.
Límit de velocitat per defecte: la velocitat màxima predeterminada de la velocitat de tall automàtic en encendre la màquina.
Mode automàtic: 0, l'interruptor automàtic es controla automàticament; 1, l'interruptor automàtic controla el punt de sortida IO automàtic.
Desplaçament del límit de velocitat: la velocitat màxima del motor petit durant el tall automàtic.
Host màxim: velocitat màxima del motor gran.
Característiques elèctriques de control remot

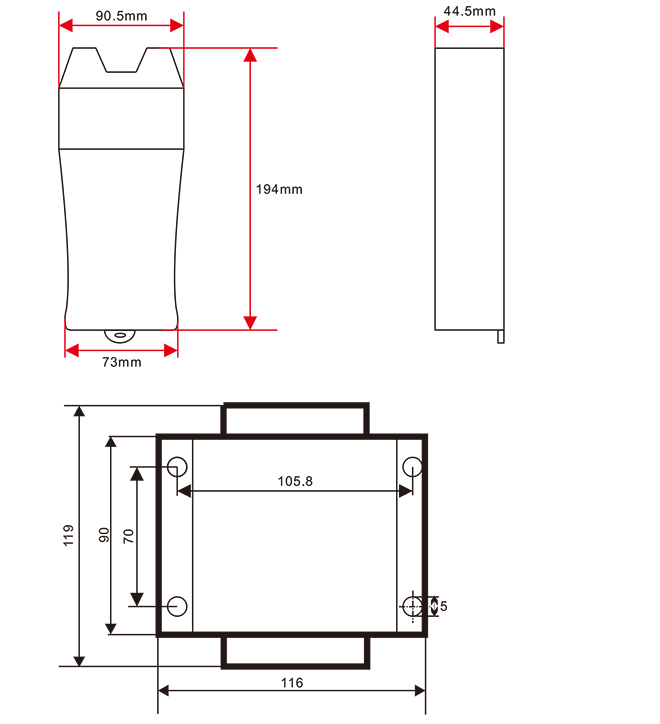
Mida de control remot
El dret d’interpretació final d’aquest producte només pertany a la nostra empresa.